Publications and patents
Publications
PhD Thesis: Design, fabrication and stiffening of soft pneumatic robots,
J Fras
QMUL 2023
![]() download
download
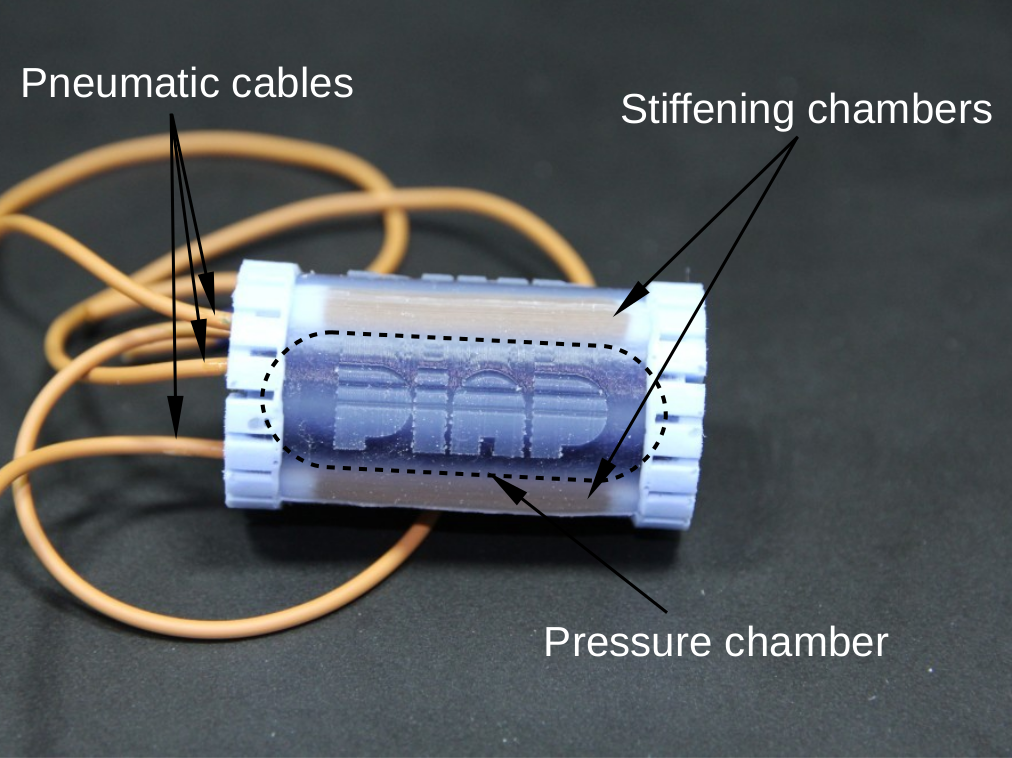
 A penis-inspired soft actuator,
A penis-inspired soft actuator,
J Fras, K Althoefer
ICRA 2023
![]() download accepted version
download accepted version
 Instant soft robot: A simple recipe for quick and easy manufacturing,
Instant soft robot: A simple recipe for quick and easy manufacturing,
J Fras, J. Glowka, K Althoefer
IEEE International Conference on Soft Robotics (RoboSoft), 2020
![]() download accepted version
download accepted version
Soft fiber-reinforced pneumatic actuator design and fabrication: Towards robust, soft robotic systems,
J Fras, K Althoefer
TAROS 2019
![]() download accepted version
download accepted version
 Elasticity Versus Hyperelasticity Considerations in Quasistatic Modeling of a Soft Finger-Like Robotic Appendage for Real-Time Position and Force Estimation,
Elasticity Versus Hyperelasticity Considerations in Quasistatic Modeling of a Soft Finger-Like Robotic Appendage for Real-Time Position and Force Estimation,
A Shiva, S.M. H Sadati, Y Noh, J Fras, A Ataka, H Würdemann, ...
Soft Robotics, 2019
 Dynamic Modeling of Fiber-Reinforced Soft Manipulator: A Visco-Hyperelastic Material-Based Continuum Mechanics Approach,
Dynamic Modeling of Fiber-Reinforced Soft Manipulator: A Visco-Hyperelastic Material-Based Continuum Mechanics Approach,
SM Mustaza, Y Elsayed, C Lekakou, C Saaj, J Fras
Soft Robotics, 2019
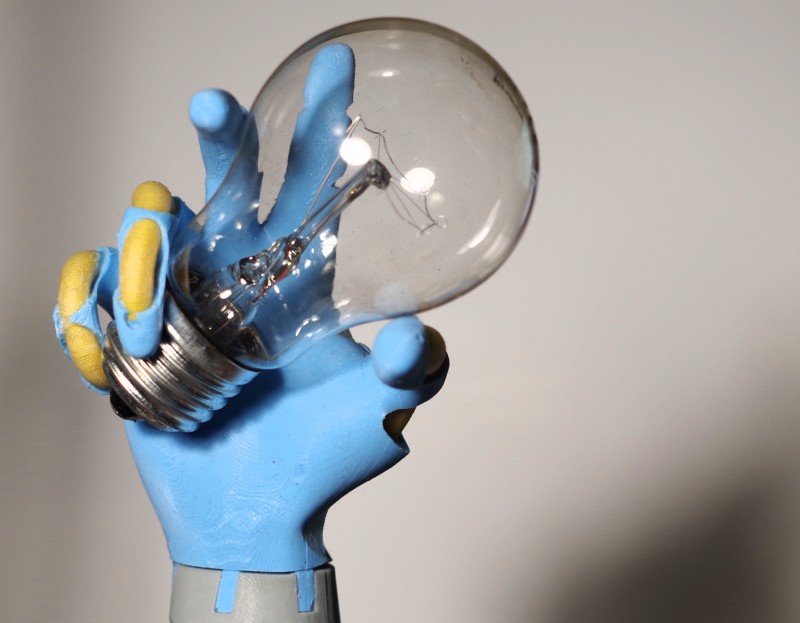 Soft biomimetic prosthetic hand: Design, manufacturing and preliminary examination,
Soft biomimetic prosthetic hand: Design, manufacturing and preliminary examination,
J Fras, K Althoefer
IROS 2018
![]() download accepted version
download accepted version
 Bio-inspired octopus robot based on novel soft fluidic actuator,
Bio-inspired octopus robot based on novel soft fluidic actuator,
J Fras, Y Noh, M Macias, H Wurdemann, K Althoefer
ICRA 2018
![]() download accepted version
download accepted version
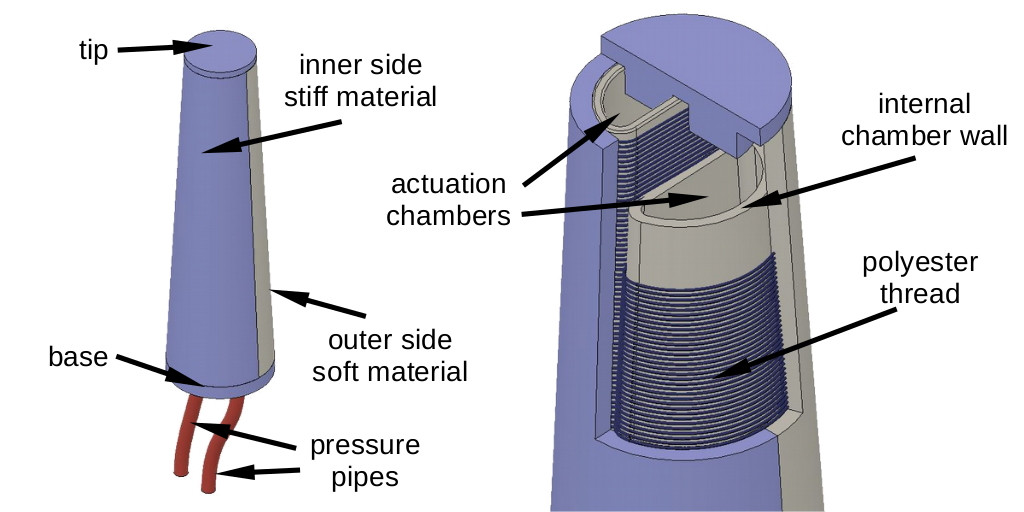 Fluidical bending actuator designed for soft octopus robot tentacle,
Fluidical bending actuator designed for soft octopus robot tentacle,
J Fras, Y Noh, M Macias, K Althoefer
RoboSoft 2018
![]() download accepted version
download accepted version
Soft Manipulator Actuation Module – with Reinforced Chambers,
J Fras, M Macias, J Czarnowski, M Brancadoro, A Menciassi, J Glowka
Chapter #3, Soft and Stiffness-controllable Robotics Solutions for Minimally Invasive Surgery, The STIFF-FLOP Approach, 2018
 Modelling and Position Control of the Soft Manipulator,
Modelling and Position Control of the Soft Manipulator,
J Fras, M Macias, J Czarnowski, J Glowka
Chapter #10, Soft and Stiffness-controllable Robotics Solutions for Minimally Invasive Surgery, The STIFF-FLOP Approach, 2018
New STIFF-FLOP module construction idea for improved actuation and sensing,
J Fras, J Czarnowski, M Macias, J Glowka, M Cianchetti, A Menciassi
ICRA 2015
![]() download accepted version
download accepted version
 Static modeling of multisection soft continuum manipulator for stiff-flop project
Static modeling of multisection soft continuum manipulator for stiff-flop project
J Fras, J Czarnowski, M Macias, J Glowka
Automation 2014
![]() download accepted version
download accepted version
Total mesorectal excision using a soft and flexible robotic arm: a feasibility study in cadaver models
A Arezzo, Y Mintz, ME Allaix, S Arolfo, M Bonino, G Gerboni, ...
Multi-Axis force/torque sensor based on Simply-Supported beam and optoelectronics
Y Noh, J Bimbo, S Sareh, H Wurdemann, J Fras, DS Chathuranga, H Liu, ...
 Soft Flexible Gripper Design, Characterization and Application
Soft Flexible Gripper Design, Characterization and Application
J Fras, M Macias, F Czubaczynski, P Salek, J Glowka
![]() download accepted version
download accepted version
 Visual Marker Based Shape Recognition System for Continuum Manipulators
Visual Marker Based Shape Recognition System for Continuum Manipulators
J Fras, S Tabaka, J Czarnowski
![]() download accepted version
download accepted version
 Soft fluidic rotary actuator with improved actuation properties
Soft fluidic rotary actuator with improved actuation properties
J Fras, Y Noh, HA Wurdemann, K Althoefer
![]() download accepted version
download accepted version
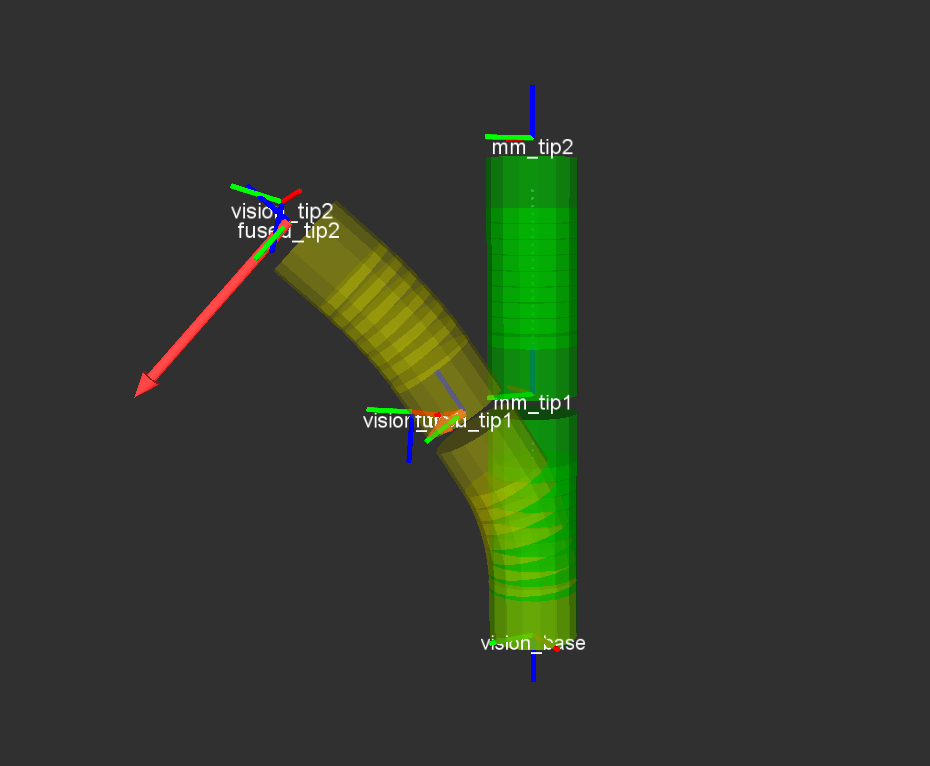
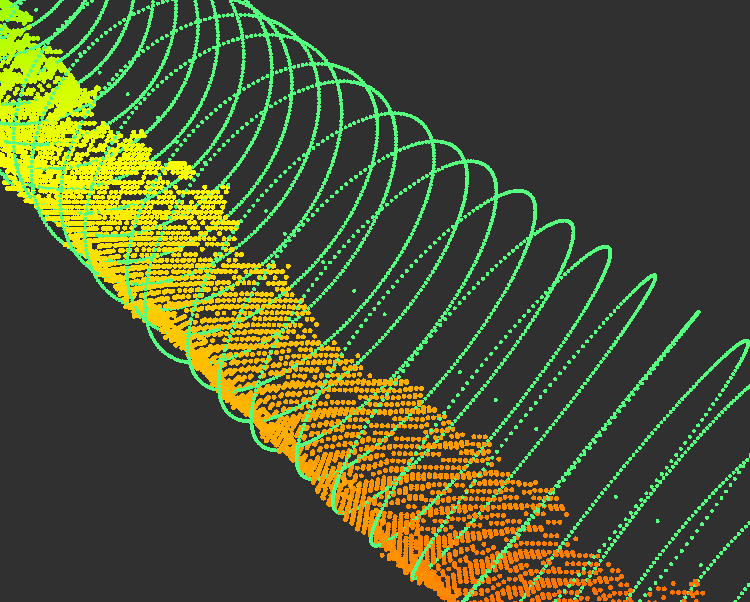 Depth-Map-Based Shape Recognition of Soft Continuum Manipulator Body
Depth-Map-Based Shape Recognition of Soft Continuum Manipulator Body
J Fras
![]() download accepted version
download accepted version
Contact force sensor for flexible manipulators for MIS (minimally invasive surgery)
P Gawenda, Y Noh, J Fras, S Han, S Wang, R Housden, K Althoefer, ...
Highly dexterous 2-module soft robot for intra-organ navigation in minimally invasive surgery
Haider Abidi, Giada Gerboni, Margherita Brancadoro, Jan Fras, ...
Patents
Granted
- Soft manipulator, PL409670
J Fras, J Czarnowski, J Glowka, M Macias - Soft manipulator module, PL411429
J Fras, J Czarnowski, J Glowka, M Macias - Method for producing soft manipulator, PL409880
J Fras, J Czarnowski, S Tabaka, B Blicharz - Method for producing the soft manipulator module, PL411490
J Fras, J Czarnowski, J Glowka,