Soft Robotic Projects
A penis inspired soft actuator
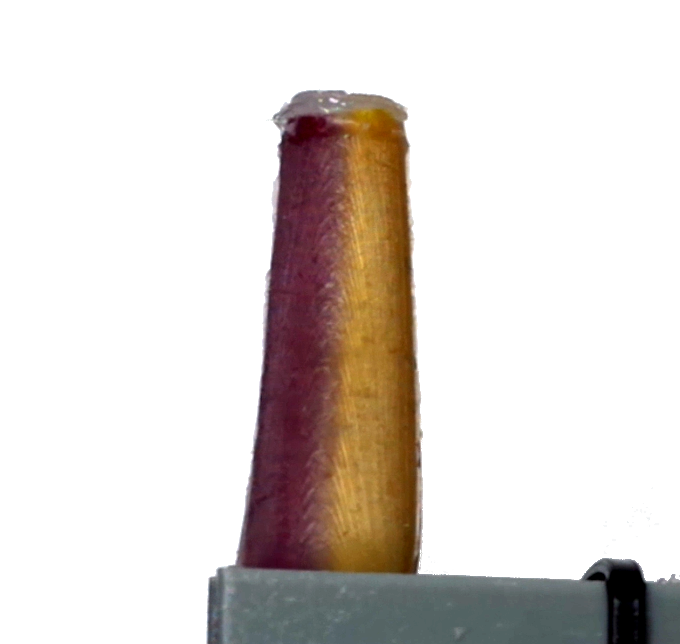
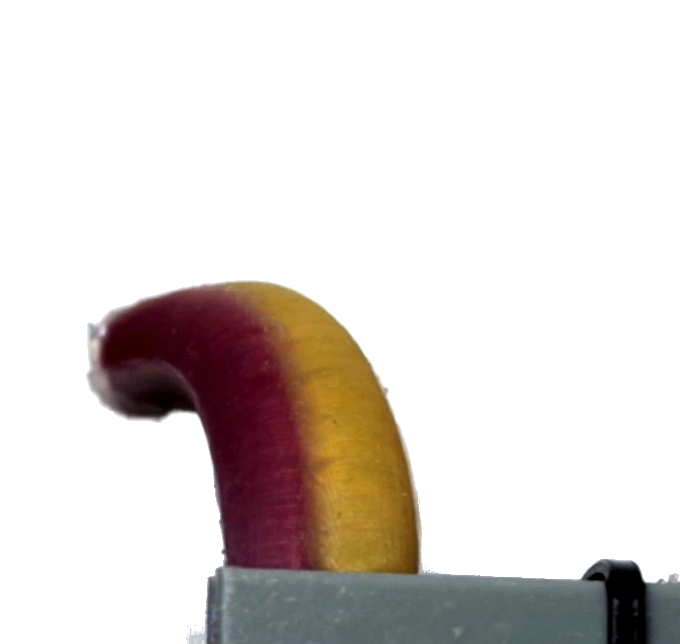
Introducing a novel soft robotic actuator inspired by the structure of the mammalian penis, our design tackles the common trade-off between flexibility and force exertion in soft robotics. The actuator incorporates an internal stiffening mechanism that dynamically increases stiffness as needed while maintaining flexibility for precise movements. This enables a dual response: soft actuation in one direction and a stiffened, forceful response in another. Ideal for applications such as robotic grippers, this innovation provides both dexterity and strength in a single device.
Check for more details in the paper.



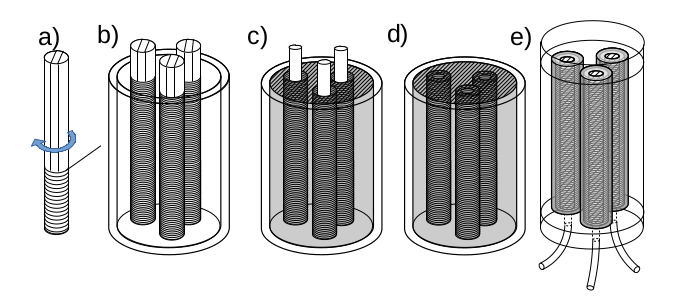
Instant soft robots
High performance, easy to fabricate soft pneumatic robots.
Just print a disposable mold that contains all the needed structures inside, including the reinforcement. Usage of a flexible filament like Nylon allows the actuator to be soft and squeezable. No special manual skills, experience nor special equipment required. Print the mold, fill it with silicone, and break it out after the silicone cures. The instant robot family so far consists of linear and bending actuators and a 3-degrees-of-freedom manipulation module.
Download cad files and try it out!
Check for more details in the paper.



Soft robotic fish
Swimming robotic fish. Fiber-reinforced actuators, work in progress.
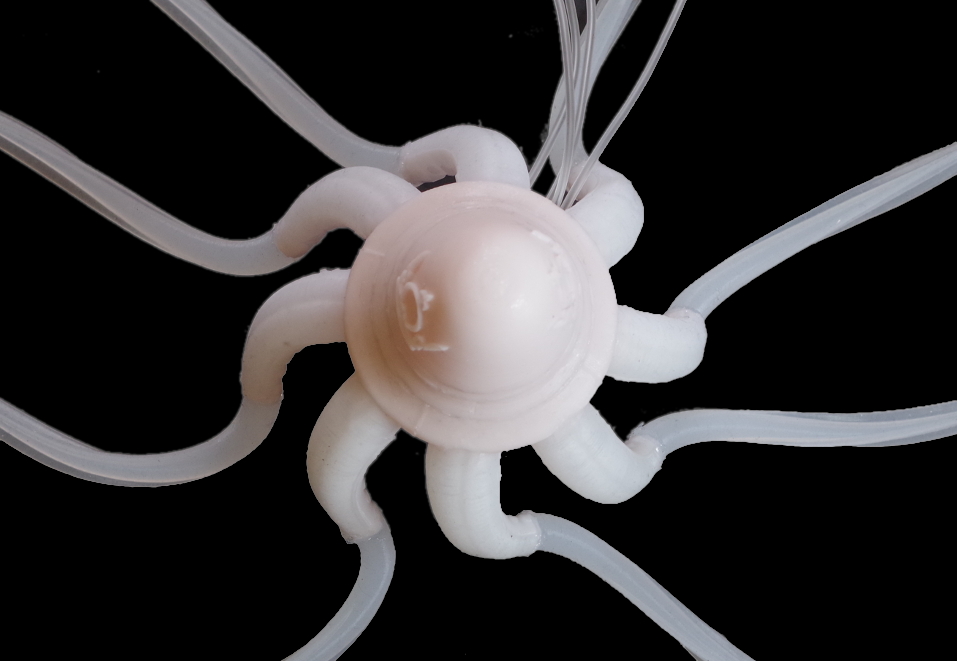
Soft pneumatic octopus
Swimming octopus robot with no rigid parts. Currently pneumatic with an external power source, but I work extensively to make it standalone hydraulic device. The robot can swim straight, turn in any direction and twist along its primary axis.



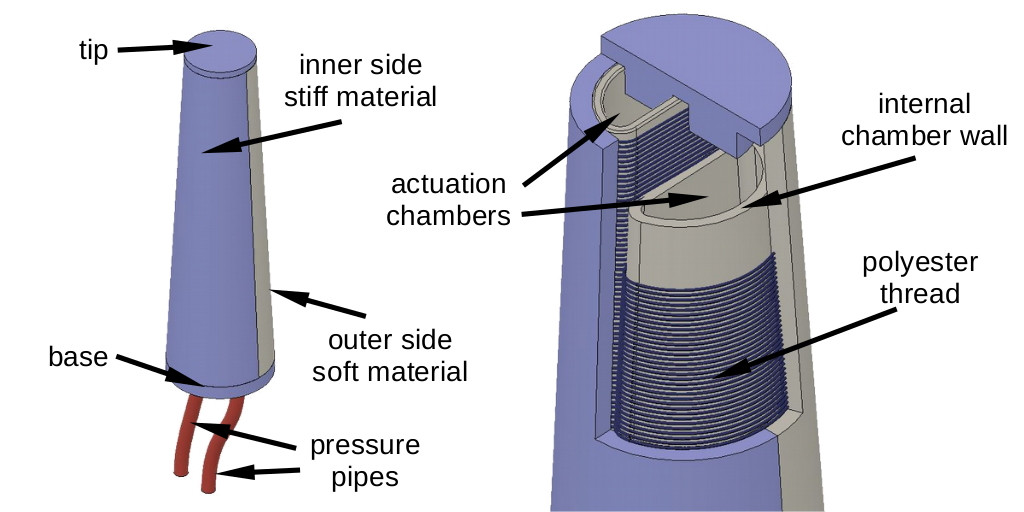
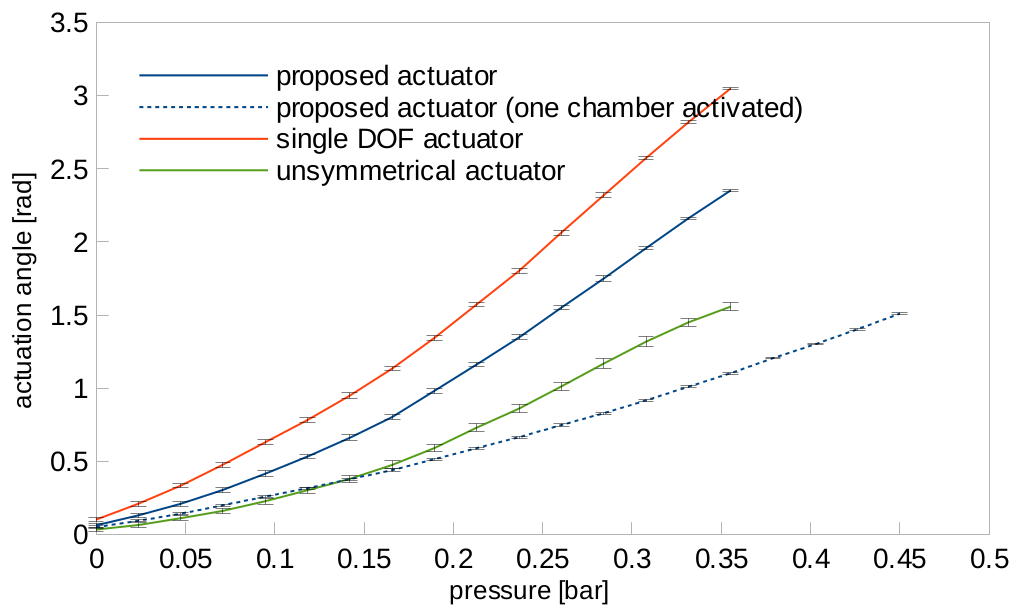
Octopus' tentacle
The robot is driven by novel pneumatic actuator. It maximizes the actuation area while providing 2 degrees of freedom.





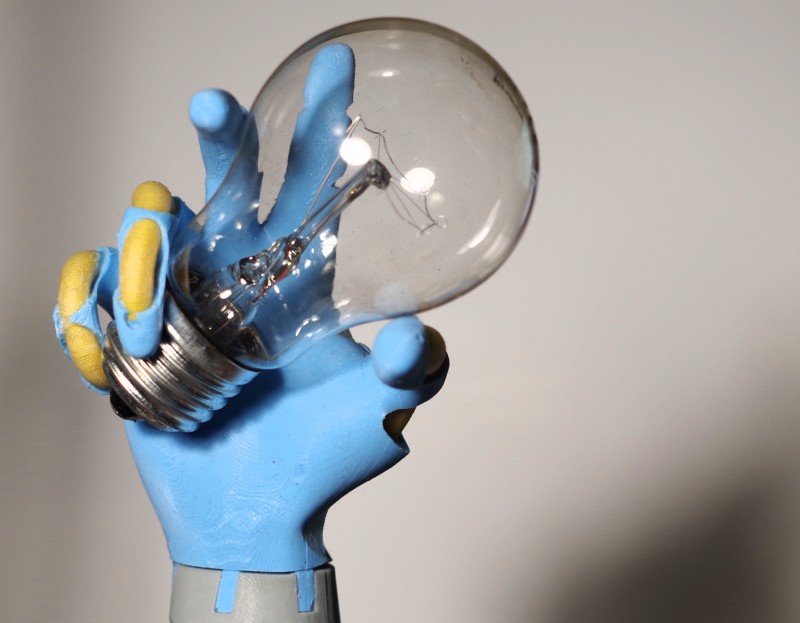
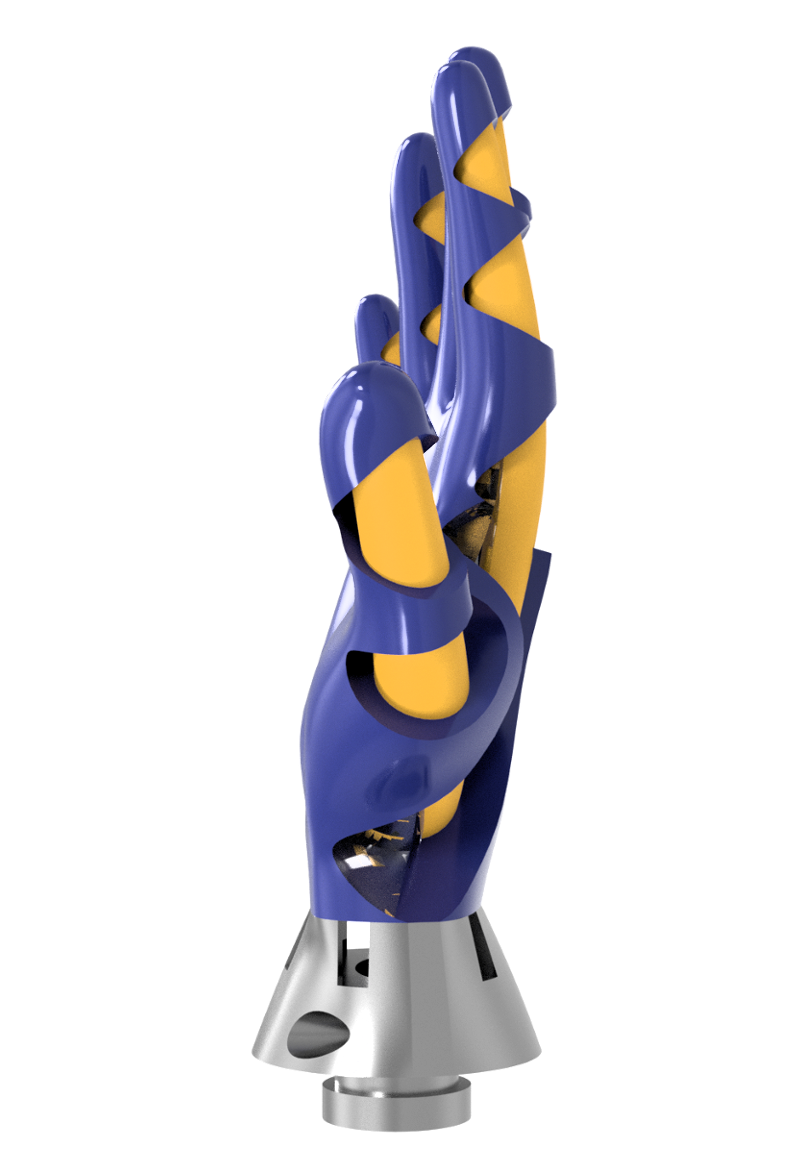
Soft prosthetic hand
Prosthetic hand made with soft materials only. It consists of exoskeleton made of less flexible silicone rubber that defines its motion and soft fluidical actuators housed in fingers. It provides 6 degrees of actuation as the thumb contains 2 separate sets of actuators that allow to bend and to reconfigure its orientation.





















Soft industrial grippers
Pneumatic grippers for special tasks, developed for PIAP. They are soft and compliant so suitable for fragile and delicate objects. They do not require any sophisticated control as they adapt to the handled objects. It has been designed for mobile antiterrorist robots manufactured at PIAP.






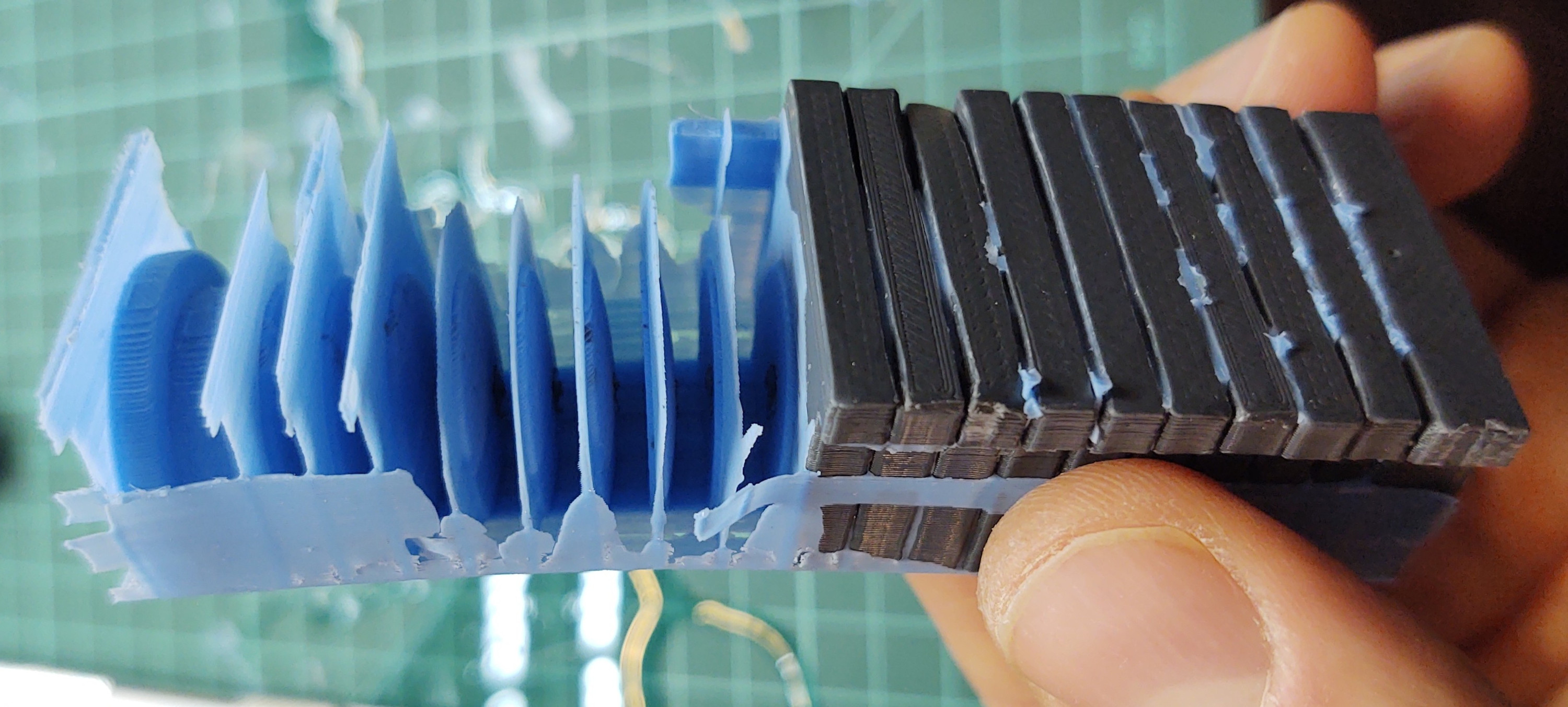
Soft 3D-printed actuators
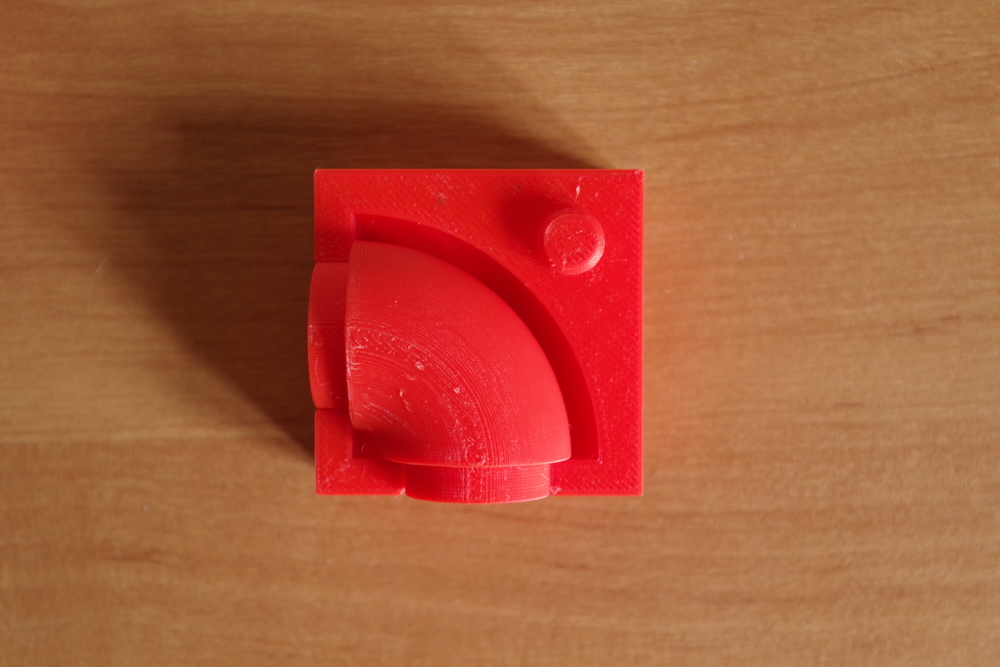
I am investigating a new idea of direct printing of soft robots. Such an approach would decrease manufacturing costs drastically!
An interesting idea is also to mix the moulding and printing techniques.

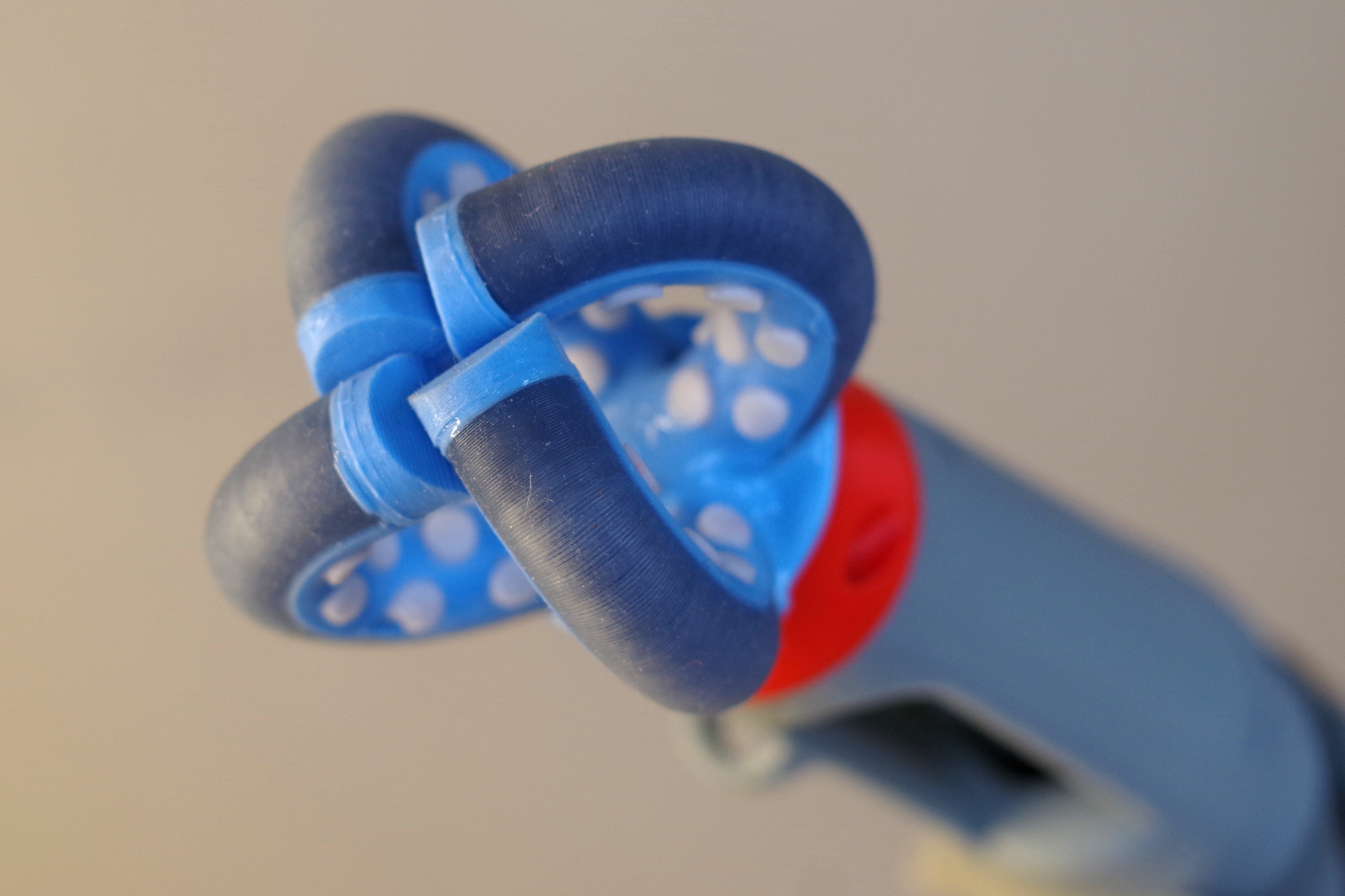
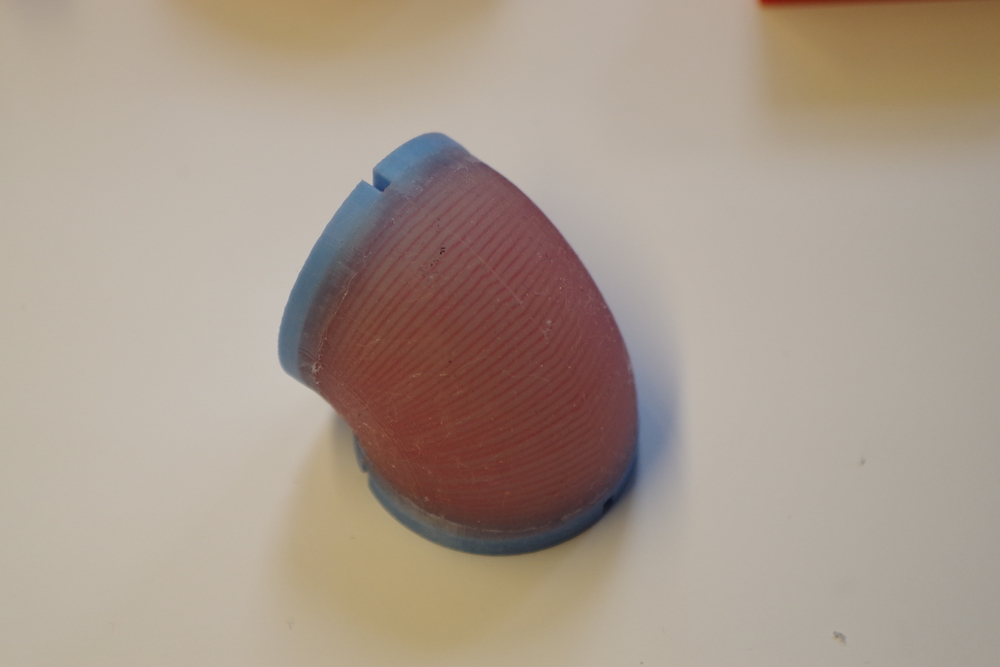
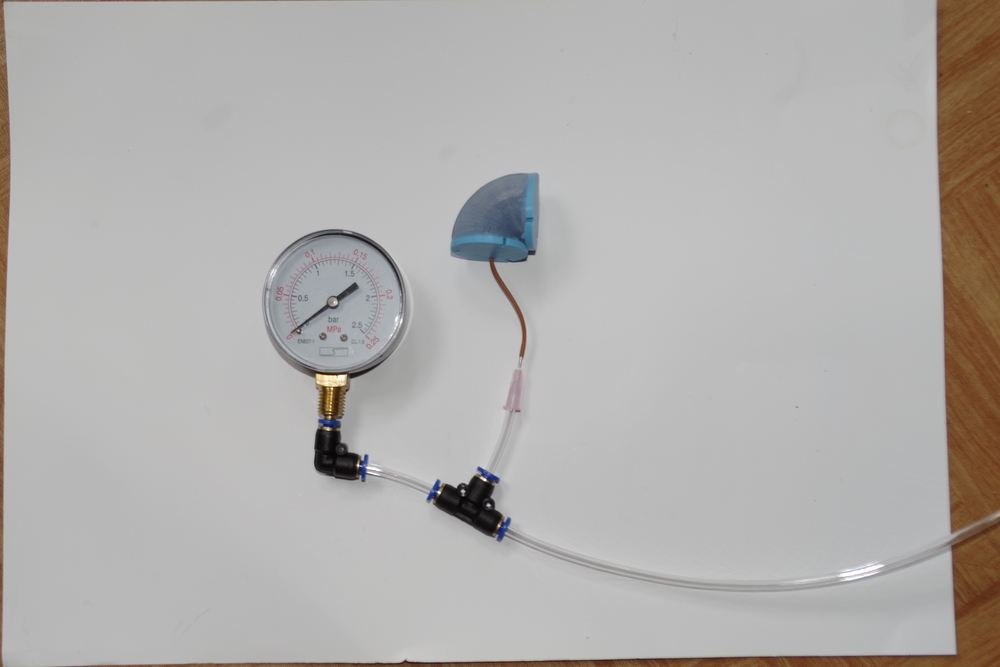
Soft fluidic rotary actuator
A small project of a soft rotary actuator. It is fiber-reinforced and generates rotation when pressurized.

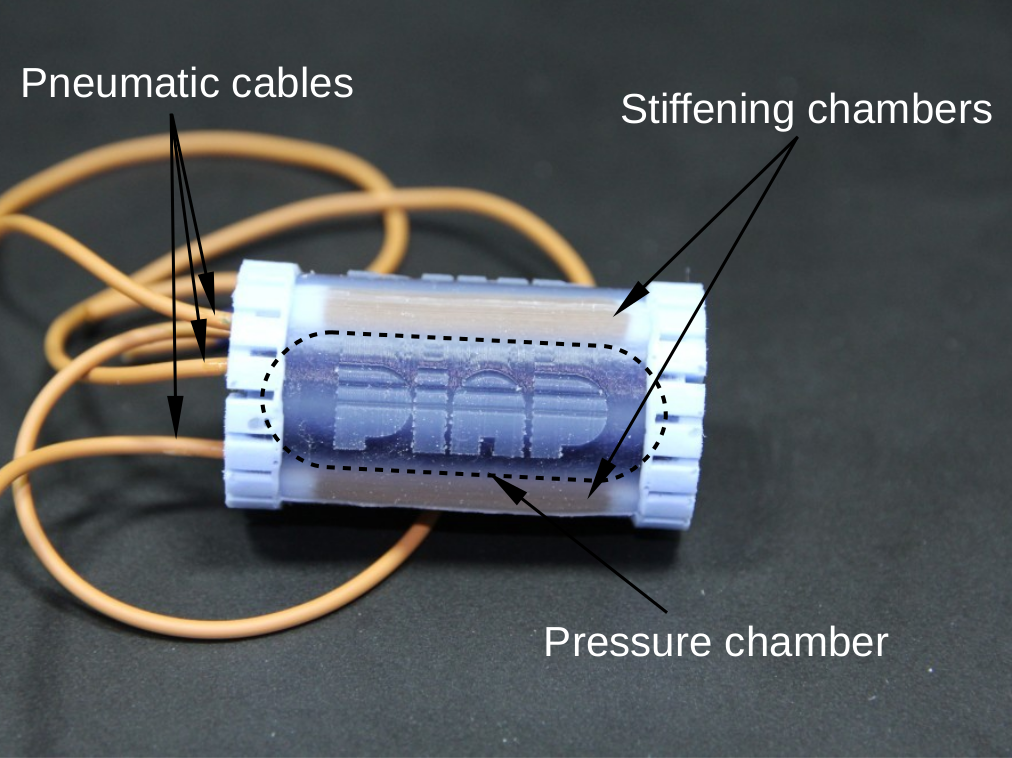
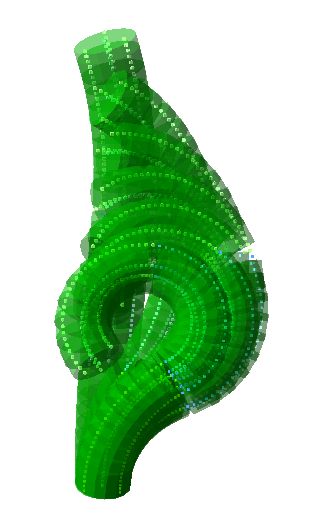
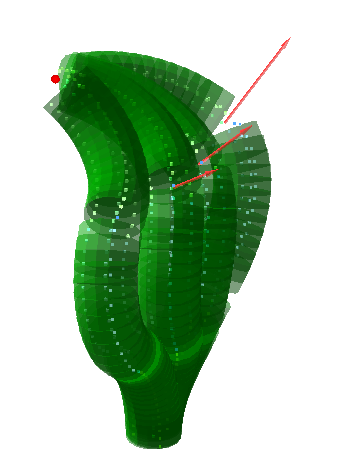
STIFF-FLOP
European project focusing on a soft pneumatic medical robot. I have been working on several aspects in that project, mainly as PIAP's researcher. The most important are the manipulator design, physics modeling and inverse kinematics: